STM32MP157-M4_Examples
2.12 SysTick定时器-us延时
- 设计需求 这里假设需求为使用SysTick定时器,得到一个us级别的延时。
2.12.1 基础知识
SysTick定时器(又名系统滴答定时器)是存在于内核的一个定时器,只要是ARMCotex-M系列内核的MCU都包含这个定时器。使用内核的SysTick定时器来实现延时,可以不占用系统定时器,节约资源。由于和MCU外设无关,因此可以在不同厂家的Cortex-M内核之间移植。
前面使用通用定时器,实现了一个us级别延时,这里再用SysTick实现一次。注意SysTick用于了HAL库的毫秒级延时函数“HAL_Delay()”,不建议日常使用SysTick去作为其它用途,这里只作为演示。
2.12.2 硬件设计
SysTick定时器不涉及硬件,这里只需要一个LED灯去展示延时效果。
2.12.3 MX设置
参考前面创建一个STM32CubeIDE工程,在STM32CubeMX里添加LED灯,设置M4时钟为209MHz,其它无需操作。
2.12.4 代码设计
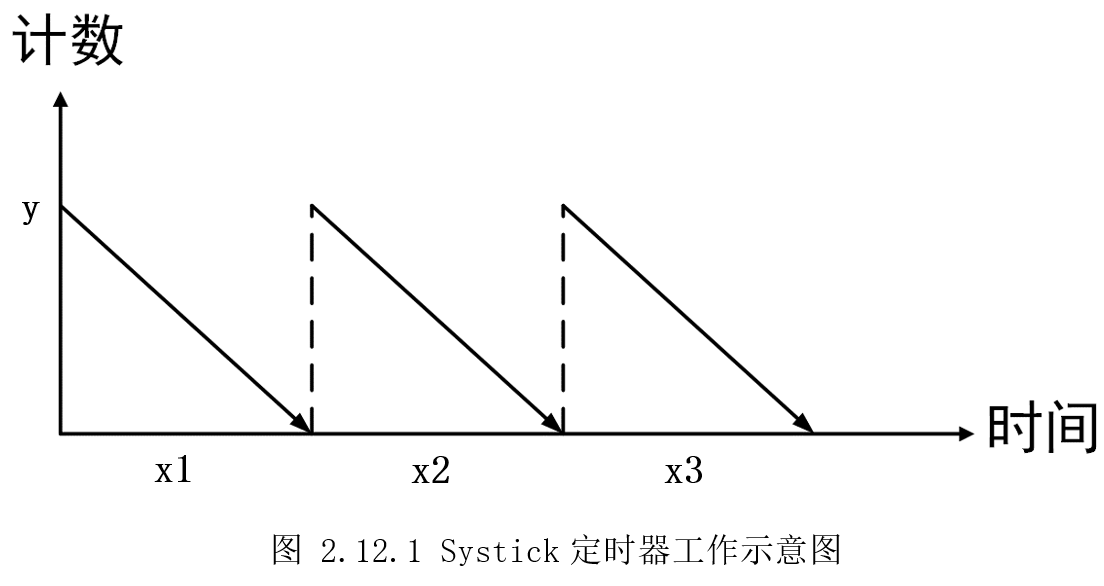
SysTick定时器是一个24位递减定时器,即计数器可以从最大值224开始每个时钟周期减1,当减到0时,会产生一个中断,同时再自动重载定时初值,开始新一轮计数。而这个定时初值,则是我们可以设置的,就可以实现得到指定时间。如下图2.12.1所示,y为定时器初值,然后随着时间增加,值逐渐减小,直至为0,再重新加载初值,如此往复,x1、x2、x3这些时间段,就是我们需要的。
M4工作在209MHz,即209000000Hz,意味着1s时间内,会计数209000000次。那么1us则计数209000000/1000000=209次。这个209就是滴答定时器的初始值,将这个值写入滴答定时器,定时器在每个时钟周期减1,减到0时,就刚好是1us,同时产生中断通知,再次加载209如此反复。HAL库提供“HAL_SYSTICK_Config()”函数去设置这个初始值。
在“DemoDriver”目录新建“driver_systick.c”和“driver_systick.h”。首先需要初始化Systick,让其初始值为209,再设置SysTick定时器的中断优先级,最后使能SysTick定时器中断。
/*
* 函数名:void SysTickInit(void)
* 输入参数:无
* 输出参数:无
* 返回值:无
* 函数作用:初始化系统滴答时钟的频率和中断优先级
*/
void SysTickInit(void)
{
uint32_t init_t = 0;
init_t = SystemCoreClock/1000000;
/* 时间(单位:s)=1/频率(单位:HZ)
* SystemCoreClock频率: 209MHz = 209,000,000
* 即MCU 1秒会计数209,000,000次
* 1us则计数 209MHz/1000000 = 209次
* 209就是滴答时钟的初始值,它向下计数209次,计数将变为0,就会产生一次中断
*
* SystemCoreClock/1000: 1ms中断一次
* SystemCoreClock/100000: 10us中断一次
* SystemCoreClock/1000000: 1us中断一次
*/
if(HAL_SYSTICK_Config(init_t) != HAL_OK)
{
Error_Handler();
}
// 设置滴答定时器中断优先级:最高
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
// 使能滴答定时器中断
HAL_NVIC_EnableIRQ(SysTick_IRQn);
}
配置完成后,每个1us就会产生一次中断,也就会调用“stm32mp1xx_it.c”里的“SysTick_Handler()”。为了不影响HAL库的“HAL_Delay()”,这里添加一个自己的中断处理函数“OwnSysTick_Handler()”。
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
OwnSysTick_Handler();
/* USER CODE END SysTick_IRQn 1 */
}
/*
* 全局变量定义
*/
static volatile uint32_t systick_t = 0
……
/*
* 函数名:void SysTickDelay(uint16_t u)
* 输入参数:u-延时时间
* 输出参数:无
* 返回值:无
* 函数作用:滴答定时器实现的延时函数
*/
void SysTickDelay(uint32_t u)
{
systick_t = u;
while(systick_t != 0);
}
/*
* 函数名:void OwnSysTick_Handler(void)
* 输入参数:无
* 输出参数:无
* 返回值:无
* 函数作用:滴答定时器的中断服务函数
*/
void OwnSysTick_Handler(void)
{
if(systick_t != 0)
{
systick_t--;
}
}
回到“driver_systick.c”,我们定义个一个全局变量“systick_t”,用于记录需要多少个1us,然后中断函数里每次将“systick_t”减1,这样就循环了“systick_t”个1us。
“main.c”即可调用“SysTickDelay()”实现us级别延时。
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
SysTickInit();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
LED_GREEN_ON();
SysTickDelay(1000000);
LED_GREEN_OFF();
SysTickDelay(1000000);
}
/* USER CODE END 3 */
}
2.12.5 实验效果
调试运行后,可以看到LED灯基本按1S间隔进行闪烁。测试效果不严谨,有条件的读者可以修改测试代码,使用示波器或逻辑分析仪观察引脚翻转,验证实验效果。