STM32MP157-M4_Examples
2.16 I2C—软件模拟
- 设计需求
这里假设需求为使用GPIO模拟I2C获取板子传感器AP3216C的数据。
2.16.1 基础知识
I²C(Inter-IntegratedCircuit),常读作“I方C”,它是一种多主从架构串行通信总线。在1980年由飞利浦公司设计,为了让主板、嵌入式系统或手机连接低速周边设备。如今在嵌入式领域是非常常见通信协议,常用于MPU/MCU与外部设备连接通信、数据传输。
I²C由两条线组成,一条双向串行数据线SDA,一条串行时钟线SCL。每个连接到总线的设备都有一个独立的地址,主机可以通过该地址来访问不同设备。因为I²C协议比较简单,常常用GPIO来模拟I²C时序,这种方法称为模拟I²C。如果使用MCU的I²C控制器,设置好I²C控制器,I²C控制器就自动实现协议时序,这种方式称为硬件I²C。因为I²C设备的速率比较低,通常两种方式都可以,模拟I²C方便移植,硬件I²C工作效率相对较高。
关于I²C协议,通过下面例子进行一个形象的比喻方便大家理解,如图2.16.1所示,老师(MCU)将球(数据)传给众多学生中的一个(众多外设设备中的一个)。

老师:可以把球发给学生,也可以把球从学生中接过来。
① 发球:
老师说:注意了(start);
老师对A学生说,我要球发给你(A就是地址);
老师就把球发出去了(传输);
A收到球之后,应该告诉老师一声(回应);
老师说下课(停止)。
② 接球:
老师说注意了(start);
老师说:B把球发给我(B是地址);
B就把球发给老师(传输);
老师收到球之后,给B说一声,表示收到球了(回应);
老师说下课(停止)。
从上面这个例子,分析IIC的传输(发送和接收)需要准备哪些函数:
① 老师说注意了,表示开始信号(start);
② 老师告诉某个学生,表示发送地址(address);
③ 老师发球/接球,表示数据的发送/接收(send/read);
④ 老师/学生收到球,回应/不回应/等待回应(ack/noack/getack);
⑤ 老师说下课,表示I2C传输结束(stop);
如果是软件模拟I²C,就需要自己去实现每个操作,封装成函数。比如开始信号,就是先把SCL拉高,再SDA由高变低,这样就表示了一个开始信号。关于模拟I²C的实现函数,读者参考后面代码和相关时序文档。
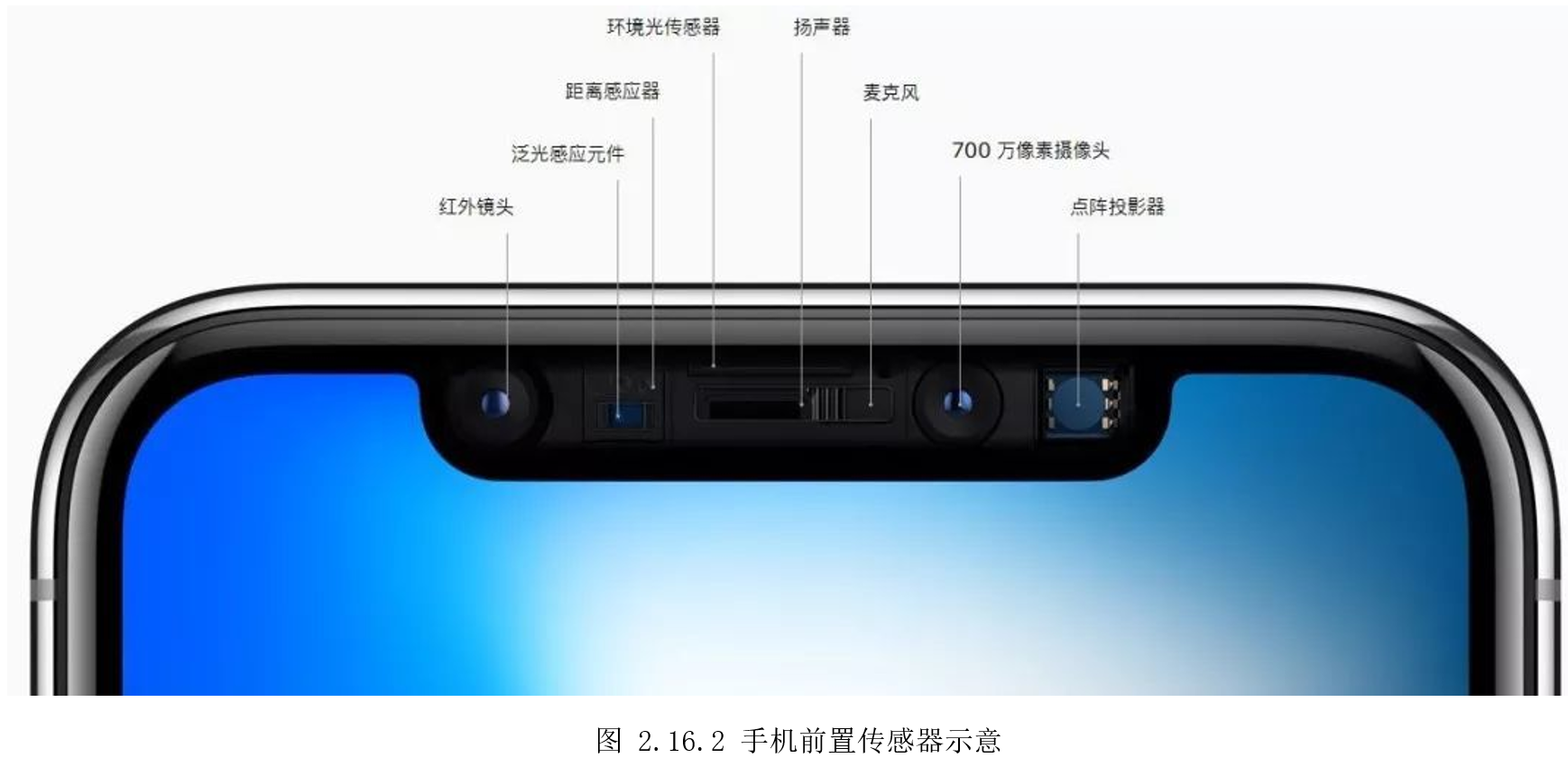
AP3216C芯片集成了光强传感器(ALS:AmbientLight Sensor)、接近传感器(PS: Proximity Sensor)、红外LED(IRLED),最常见的应用就是手机。当我们接听电话时,耳朵靠近手机前置扬声器附近,也就靠近了该传感器,此时距离传感器就告诉CPU可以关闭屏幕显示,以防误触。光强传感器能识别当前环境光,告诉CPU对应调节屏幕亮度,手机常见传感器如所示。
2.16.2 硬件设计
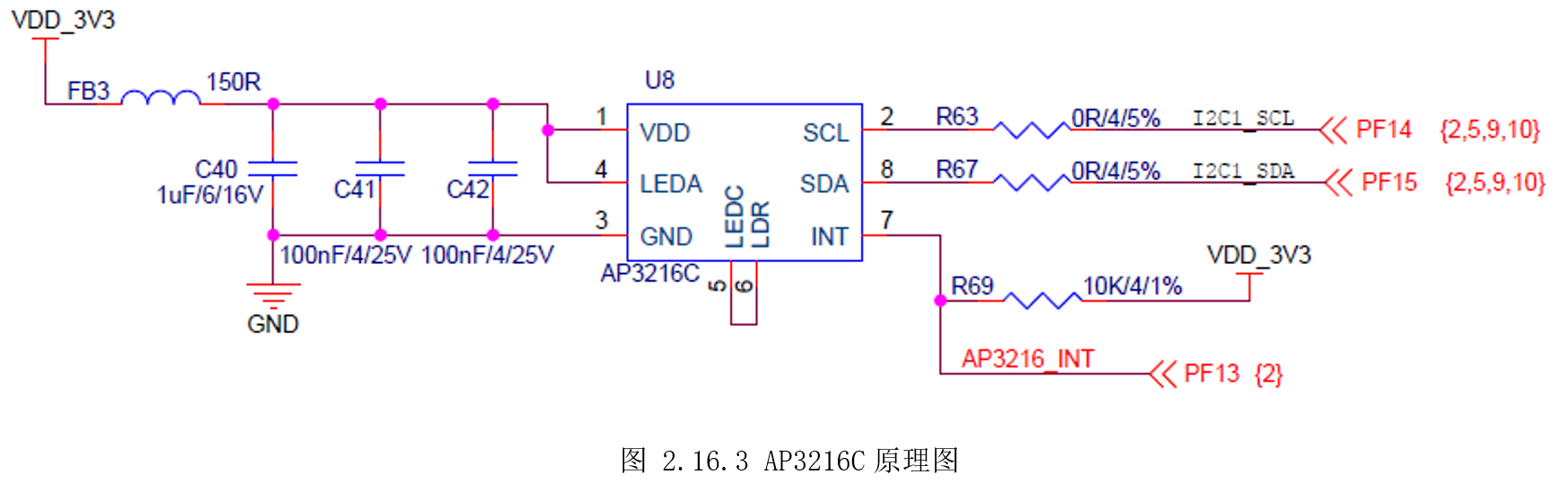
如图2.16.3所示,AP3216C接在了I2C1上,这里使用GPIO模拟,可知PF14模拟作为SCL信号,PF15作为SDA信号。
2.16.3 MX设置
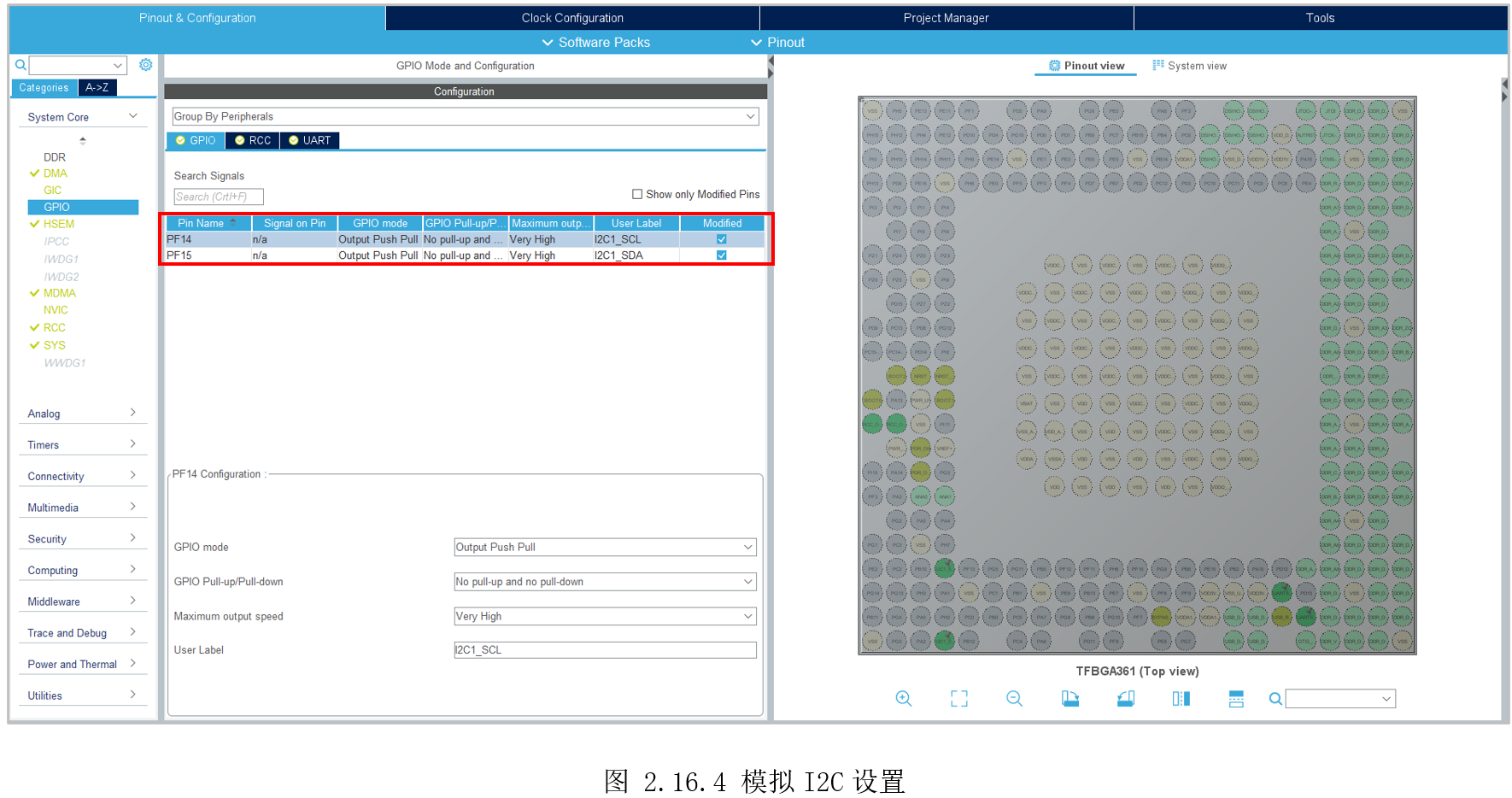
先设置好MCU系统时钟、调试串口,同时参考前面2.11通用定时器—us延时,设置TIM5用于实现us级延时。接着搜索PF14、PF15,设置为普通GPIO输出,其中PF14别名为I2C1_SCL,PF15别名为I2C1_SDA,如图2.16.4所示。
2.16.4 代码设计
创建“DemoDriver”目录,将前面的“driver_tim.c”复制到该目录,然后新建“driver_i2c1.c”实现模拟I²C协议,创建“driver_ap3216c.c”实现对AP3216C的控制。
“driver_i2c1.c”实现了模拟I²C协议,代码如下:
#define I2C_Delay() us_timer_delay(5)
/*
* 函数名:void I2C_Init(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用: SCL/SDA都初始为高电平
*/
void I2C_Init(void)
{
SCL_H();
SDA_H();
}
/*
* 函数名:static void I2C_SDA_OUT(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用:配置SDA引脚为输出
*/
static void I2C_SDA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Pin = I2C1_SDA_Pin;
HAL_GPIO_Init(I2C1_SDA_GPIO_Port, &GPIO_InitStruct);
}
/*
* 函数名:static void I2C_SDA_IN(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用:配置SDA引脚为输入
*/
static void I2C_SDA_IN(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Pin = I2C1_SDA_Pin;
HAL_GPIO_Init(I2C1_SDA_GPIO_Port, &GPIO_InitStruct);
}
/*
* 函数名:void I2C_Start(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用:I2C开始信号
*/
void I2C_Start(void)
{
I2C_SDA_OUT();
SCL_H();
I2C_Delay();
SDA_H();
I2C_Delay();
SDA_L();
I2C_Delay();
SCL_L();
I2C_Delay();
}
/*
* 函数名:void I2C_Stop(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用:I2C停止信号
*/
void I2C_Stop(void)
{
I2C_SDA_OUT();
SDA_L();
I2C_Delay();
SCL_H();
I2C_Delay();
SDA_H();
I2C_Delay();
}
/*
* 函数名:void I2C_ACK(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用:I2C发出应答信号
*/
void I2C_ACK(void)
{
I2C_SDA_OUT();
SCL_L();
I2C_Delay();
SDA_L();
I2C_Delay();
SCL_H();
I2C_Delay();
SCL_L();
I2C_Delay();
}
/*
* 函数名:void I2C_NACK(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用:I2C发出非应答信号
*/
void I2C_NACK(void)
{
I2C_SDA_OUT();
SCL_L();
I2C_Delay();
SDA_H();
I2C_Delay();
SCL_H();
I2C_Delay();
SCL_L();
I2C_Delay();
}
/*
* 函数名:uint8_t I2C_GetACK(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用:I2C等待从机的应答信号
*/
uint8_t I2C_GetACK(void)
{
uint8_t time = 0;
I2C_SDA_IN();
SCL_L();
I2C_Delay();
SDA_H();
I2C_Delay();
SCL_H();
I2C_Delay();
while(SDA_INPUT())
{
time++;
if(time>250)
{
SCL_L();
return 1;
}
}
SCL_L();
return 0;
}
/*
* 函数名:void I2C_SendByte(uint8_t data)
* 输入参数:data->发送的数据
* 输出参数:无
* 返回值:无
* 函数作用:I2C发送一个字节
*/
void I2C_SendByte(uint8_t data)
{
uint8_t cnt = 0;
I2C_SDA_OUT();
for(cnt=0; cnt<8; cnt++)
{
SCL_L();
I2C_Delay();
if(data & 0x80)
{
SDA_H();
}
else
{
SDA_L();
}
data = data<<1;
SCL_H();
I2C_Delay();
}
SCL_L();
I2C_Delay();
I2C_GetACK();
}
/*
* 函数名:uint8_t I2C_ReadByte(uint8_t ack)
* 输入参数:ack->发送的应答标志,1应答,0非应答
* 输出参数:无
* 返回值:返回读到的字节
* 函数作用:I2C读出一个字节
*/
uint8_t I2C_ReadByte(uint8_t ack)
{
uint8_t cnt;
uint8_t data = 0xFF;
I2C_SDA_IN();
SCL_L();
I2C_Delay();
for(cnt=0; cnt<8; cnt++)
{
SCL_H(); //SCL高(读取数据)
I2C_Delay();
data <<= 1;
if(SDA_INPUT())
{
data |= 0x01; //SDA高(数据有效)
}
SCL_L();
I2C_Delay();
}
//发送应答信号,为低代表应答,高代表非应答
if(ack == 0)
{
I2C_NACK();
}
else
{
I2C_ACK();
}
return data; //返回数据
}
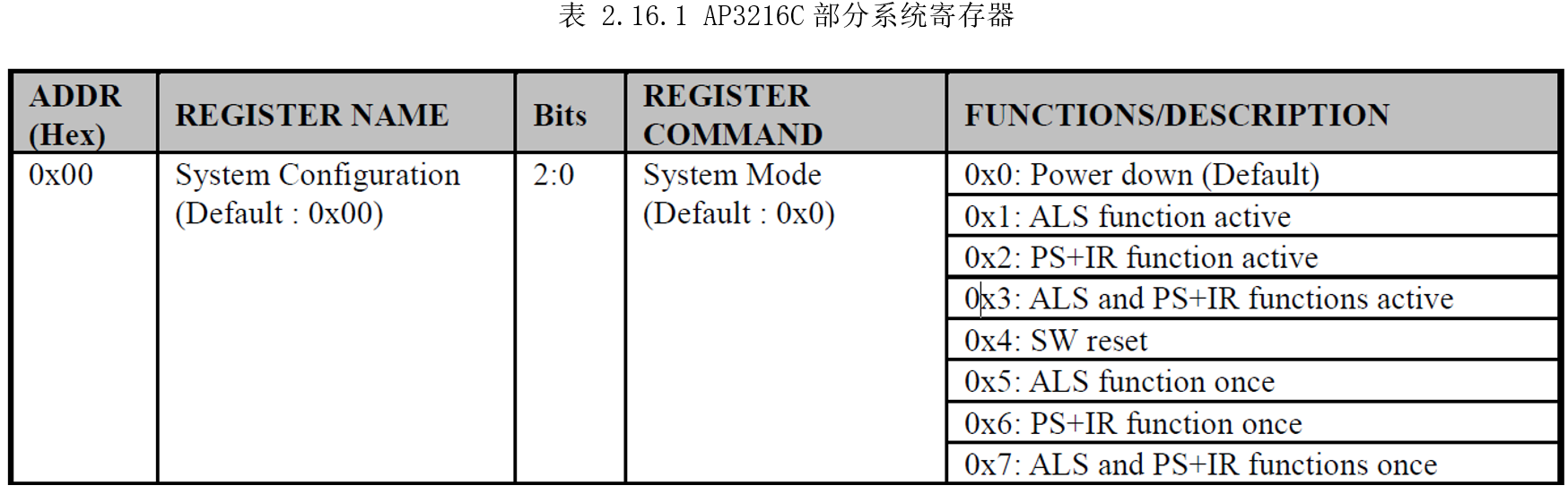
“driver_ap3216c.c”调用前面I2C协议的函数,配置AP3216C,读取AP3216C寄存器获取数据。首先初始化配置AP3216C,相关寄存器如
表 2.16.1所示,初始化流程如下:
① 复位:设置SYS_CONFIG_ADDR(0x00)寄存器为SYS_SW_RESET(0x04);
② 设置工作模式:设置SYS_CONFIG_ADDR(0x00)寄存器为SYS_ALS_PS_IR_ACT(0x03),IR+PS+ALS三个都激活使用;
③ 设置中断(这里没使用中断);
uint8_t AP3216_Init(void)
{
uint8_t ret_value = 0;
AP3216_WriteOneByte(SYS_CONFIG_ADDR, SYS_SW_RESET); // 系统软件复位
HAL_Delay(50);
AP3216_WriteOneByte(SYS_CONFIG_ADDR, SYS_ALS_PS_IR_ACT); // IR+PS+ALS三个都激活使用
HAL_Delay(50);
ret_value = AP3216_ReadOneByte(SYS_CONFIG_ADDR); // 读取配置字
if(ret_value != SYS_ALS_PS_IR_ACT) // 判断是否与设置的一致
{
return 1;
}
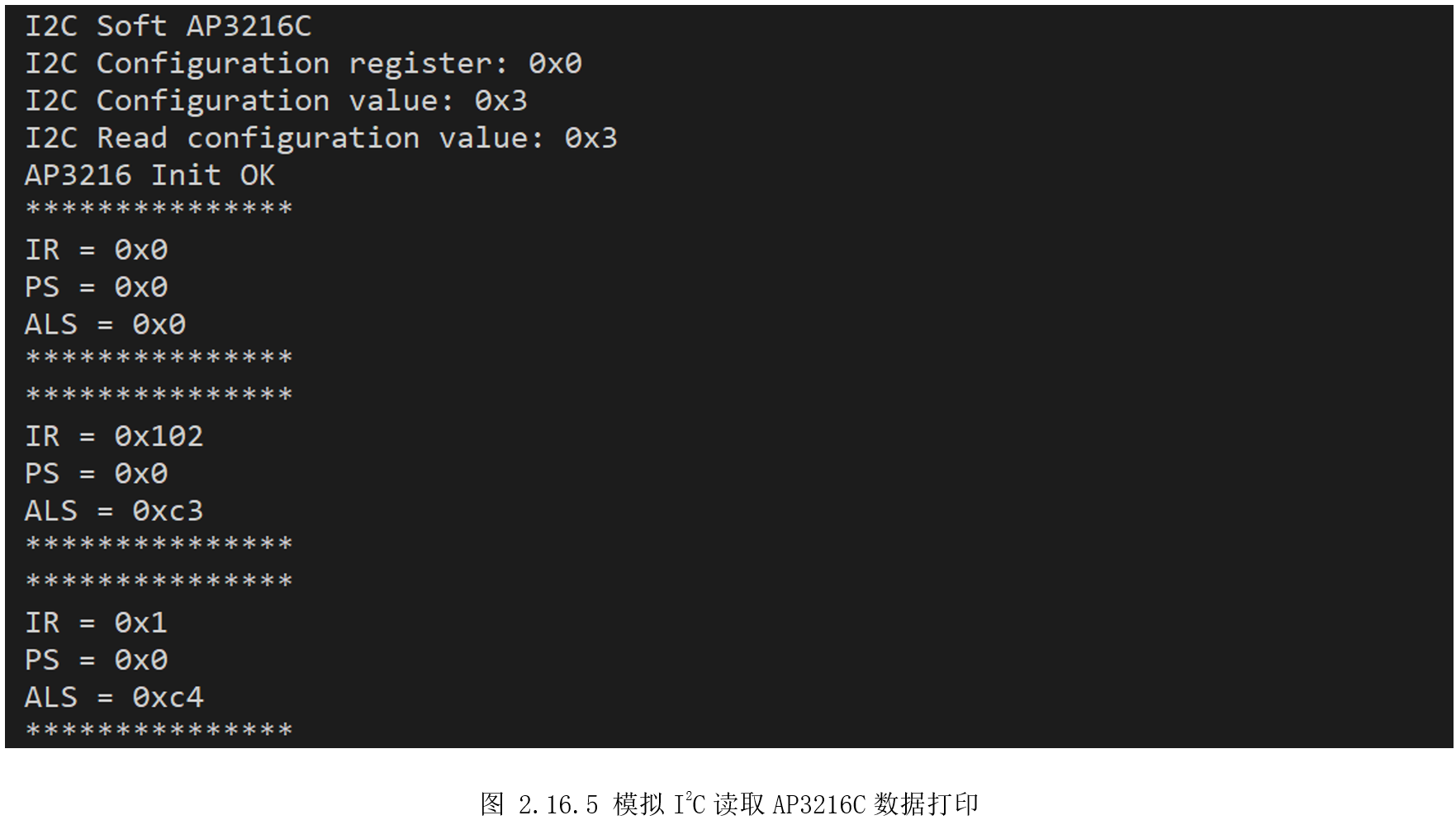
printf("\r I2C Configuration register: 0x%x \n", SYS_CONFIG_ADDR);
printf("\r I2C Configuration value: 0x%x \n", SYS_ALS_PS_IR_ACT);
printf("\r I2C Read configuration value: 0x%x \n", ret_value);
return 0;
}
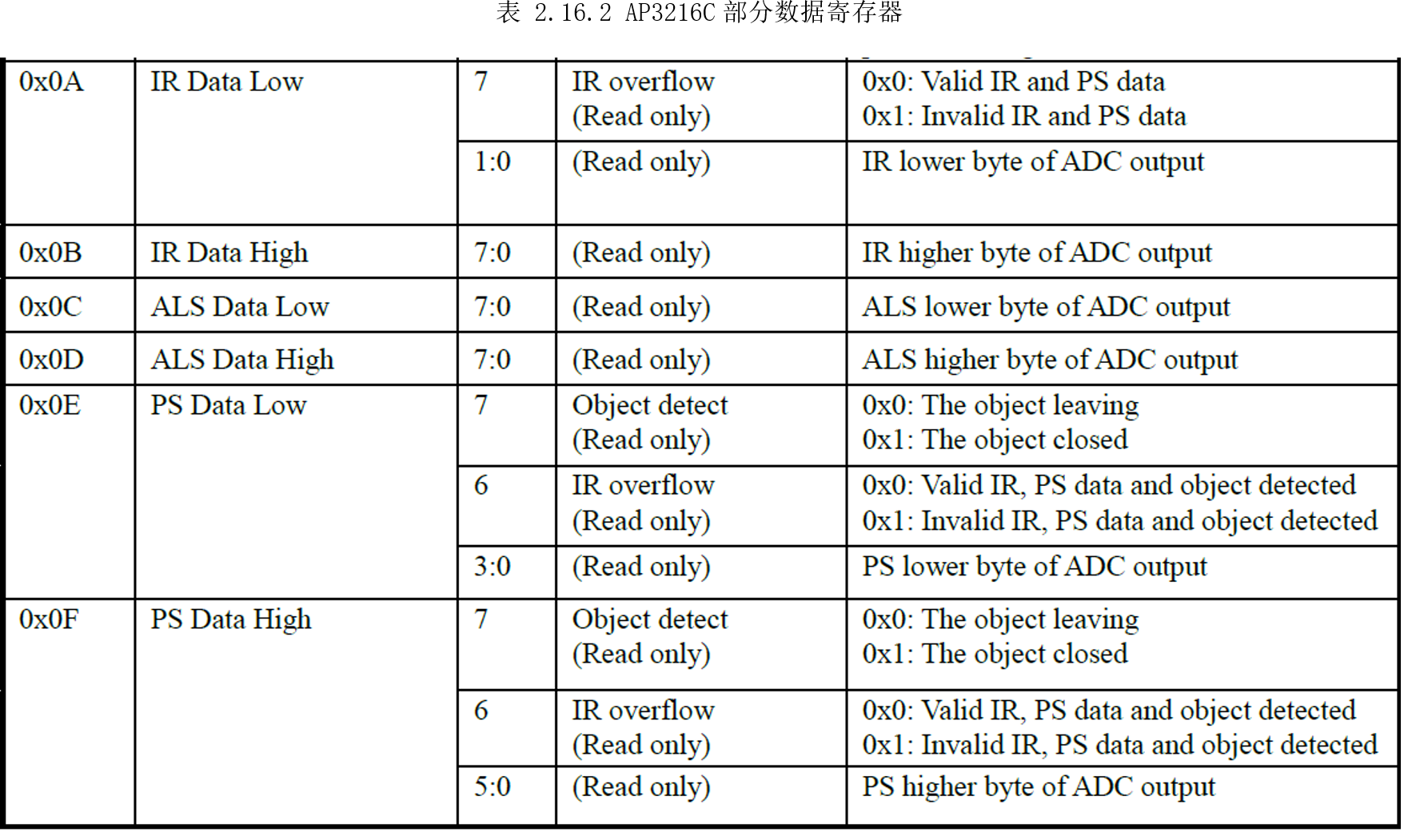
初始化配置完后,就可以读取AP3216C寄存器数据,如表 2.16.2所示,分别是IR、ALS、PS的数据,每个数据占据相邻两位。以IR为例,分别读取IR_DATA_LOW(0x0A)和IR_DATA_HIGH(0x0B)寄存器的值,再合并就得到IR的数据,同理可以得到ALS、PS的数据。
void AP3216_Read_IR_Data(uint16_t *pIR)
{
uint8_t ir_l = 0, ir_h = 0;
ir_l = AP3216_ReadOneByte(IR_DATA_LOW);
ir_h = AP3216_ReadOneByte(IR_DATA_HIGH);
if( (ir_l&0x80) == 0x80) // Invalid IR and PS data
{
*pIR = 0;
}
else // ir_l Bit[1:0] is data, ps_l bits[3:0] ans ps_h bits[5:0] is data
{
*pIR = (ir_h<<8) | (ir_l&0x03);
}
}
void AP3216_Read_PS_Data(uint16_t *pPS)
{
uint8_t ps_l = 0, ps_h = 0;
ps_l = AP3216_ReadOneByte(PS_DATA_LOW);
ps_h = AP3216_ReadOneByte(PS_DATA_HIGH);
if( (ps_l&0x40)==0x40) // Invalid IR and PS data
{
*pPS = 0;
}
else // ir_l Bit[1:0] is data, ps_l bits[3:0] ans ps_h bits[5:0] is data
{
*pPS = ((ps_h&0x1F)<<8) | (ps_l&0x0F);
}
}
void AP3216_Read_ALS_Data(uint16_t *pALS)
{
uint8_t als_l = 0, als_h = 0;
als_l = AP3216_ReadOneByte(ALS_DATA_LOW);
als_h = AP3216_ReadOneByte(ALS_DATA_HIGH);
*pALS = (als_h<<8) | (als_l);
}
主函数里,先分别初始化I2C和AP3216,再调用“AP3216_ReadDataTest()”即可获取IR、PS、ALS的打印。
2.16.5 实验效果
AP3216C板载在开发板上,位于启动拨码开关附近,背面丝印位号为U8。调试运行,可以在串口看到如图 2.16.5所示打印。将手靠近AP3216C,可以看到PS值变化,用强光照射AP3216C,可以看到ALS值变化。