STM32MP157-M4_Examples
2.19 SPI—硬件模式
- 设计需求
这里假设需求为使用硬件SPI获取板子传感器ICM20608的数据。
2.19.1 基础知识
SPI简介和ICM20608简介,参考上一实验。STM32MP157有6个硬件SPI,其中SPI6只能A7使用,余下可选择分配给A7或M4。
2.19.2 硬件设计
硬件连接参考上一个实验,这里使用硬件SPI。
2.19.3 MX设置
首先配置好MCU系统时钟和串口打印,然后如图2.19.1所示。因为使用的引脚是SPI的默认引脚,所以无需先设置引脚复用,直接切换到SPI5标签,勾选给M4,“Mode”选择“Full-DuplexMaster”,使用硬件片选,这里选择“Hardware NSS OutputSignal”。接着下方属性需要注意的是数据大小“Data Size”常见的是8位,MSB(MostSignificantBit)高位在前,时钟极性(CPOL)和时钟相位(CPHA)根据设备芯片手册需求设置,最后还需要关闭“NSSPMode”。

2.19.4 代码设计
因为使用的是硬件SPI,就不需要自己实现SPI协议时序。创建“DemoDriver”目录,复制前面的“icm_20608g.c”,需要做的仅仅是用HAL提供的硬件SPI操作函数,替换原来的GPIO模拟的SPI操作函数。调用“HAL_SPI_TransmitReceive()”收发送数据,重新编写“ICM_RW_Register()”即可,需要修改部分如下。
uint8_t ICM_RW_Register(uint8_t reg, uint8_t data)
{
uint16_t rxdata = 0;
uint16_t txdata = (data<<8) | reg;
if(HAL_SPI_TransmitReceive(&hspi5, (uint8_t*)&txdata, (uint8_t*)&rxdata, sizeof(rxdata), 300) != HAL_OK)
{
Error_Handler();
}
return (rxdata>>8);
}
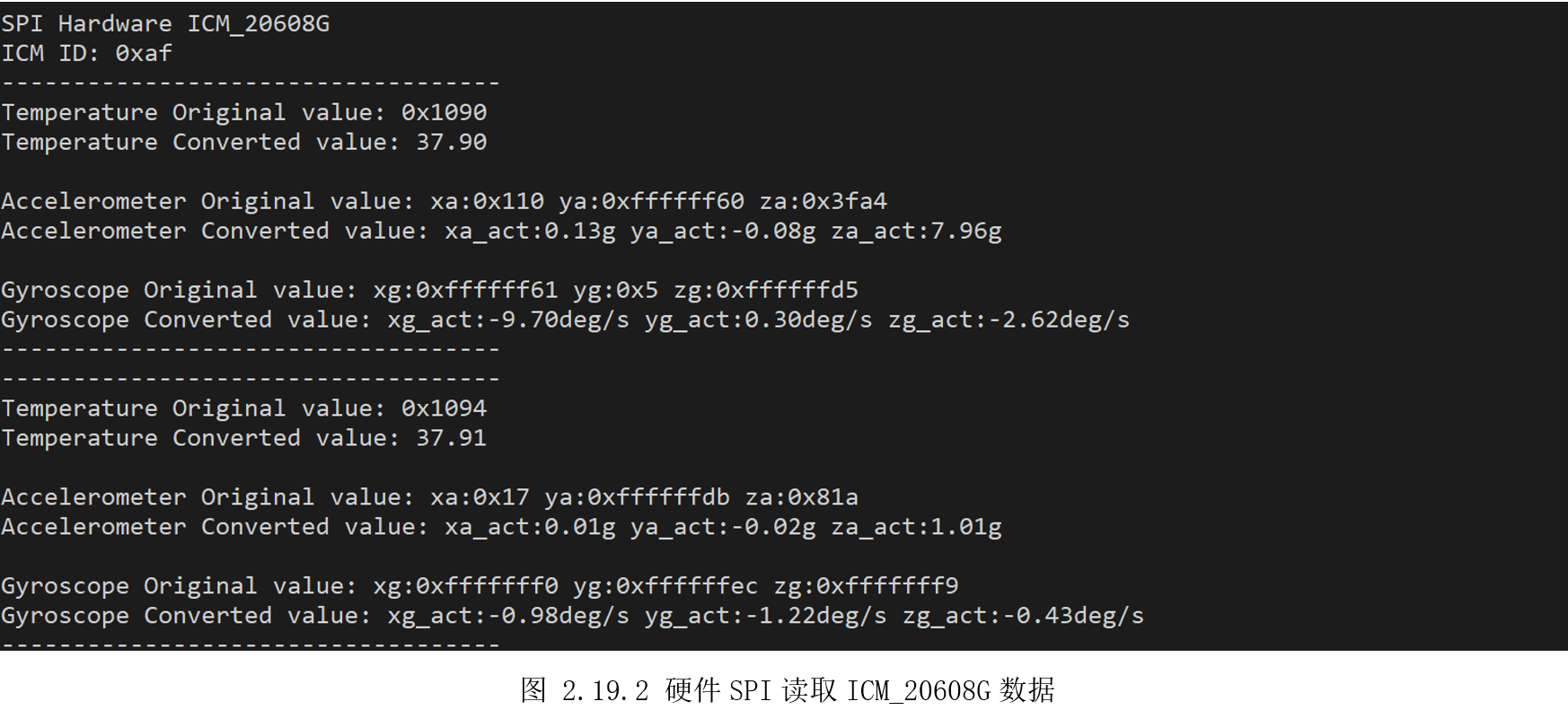
2.19.5 实验效果
调试运行,串口输出如图2.19.2所示。先打印出ICM_20608_G的ID为0xAF,再打印温度原始数据和转换数据。接着是三轴加速度传感器(重力感应器)的原始数据和转换数据,其中Z轴的值为1g,即受重力影响,大小为1g,其它两个方向无受力,数值为0,用户将板子立放将会看到数值变化。最后是三轴角速度传感器(陀螺仪)的原始数据和转换数据,开发板目前静置,三个轴方向数值为0,用户晃动开发板,将看到值对应变化。