STM32MP157-M4_Examples
2.20 CAN通信
- 设计需求
这里假设需求为使用百问网的CAN-RS485互转模块,实现RS485、CAN接口互相发送、接收数据。
2.20.1 基础知识
控制器局域网(Controller AreaNetwork,CAN),是由德国BOSCH(博世)公司开发,是目前国际上应用最为广泛的现场总线之一。其特点是可拓展性好,可承受大量数据的高速通信,高度稳定可靠,因此常应用于汽车电子领域、工业自动化、医疗设备等高要求环境。
CAN总线有两个ISO国际标准:ISO11519 和ISO11898。
-
ISO11519定义了通信速率为10~125kbps的低速CAN通信标准,属于开环总线,传输速率为40kbps时,总线长度可达1000米;
-
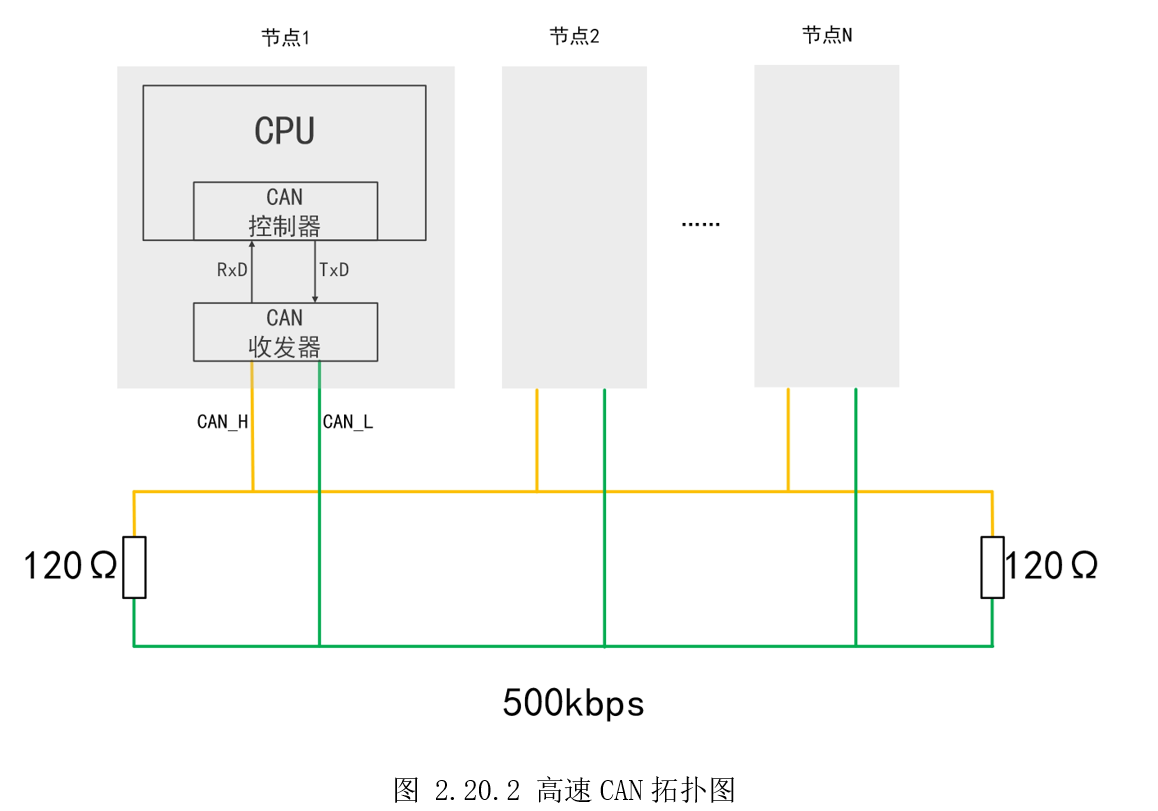
ISO11898定义了通信速率为125 kbps~1Mbps的高速CAN通信标准,属于闭环总线,传输速率可达1Mbps,总线长度≤40米;
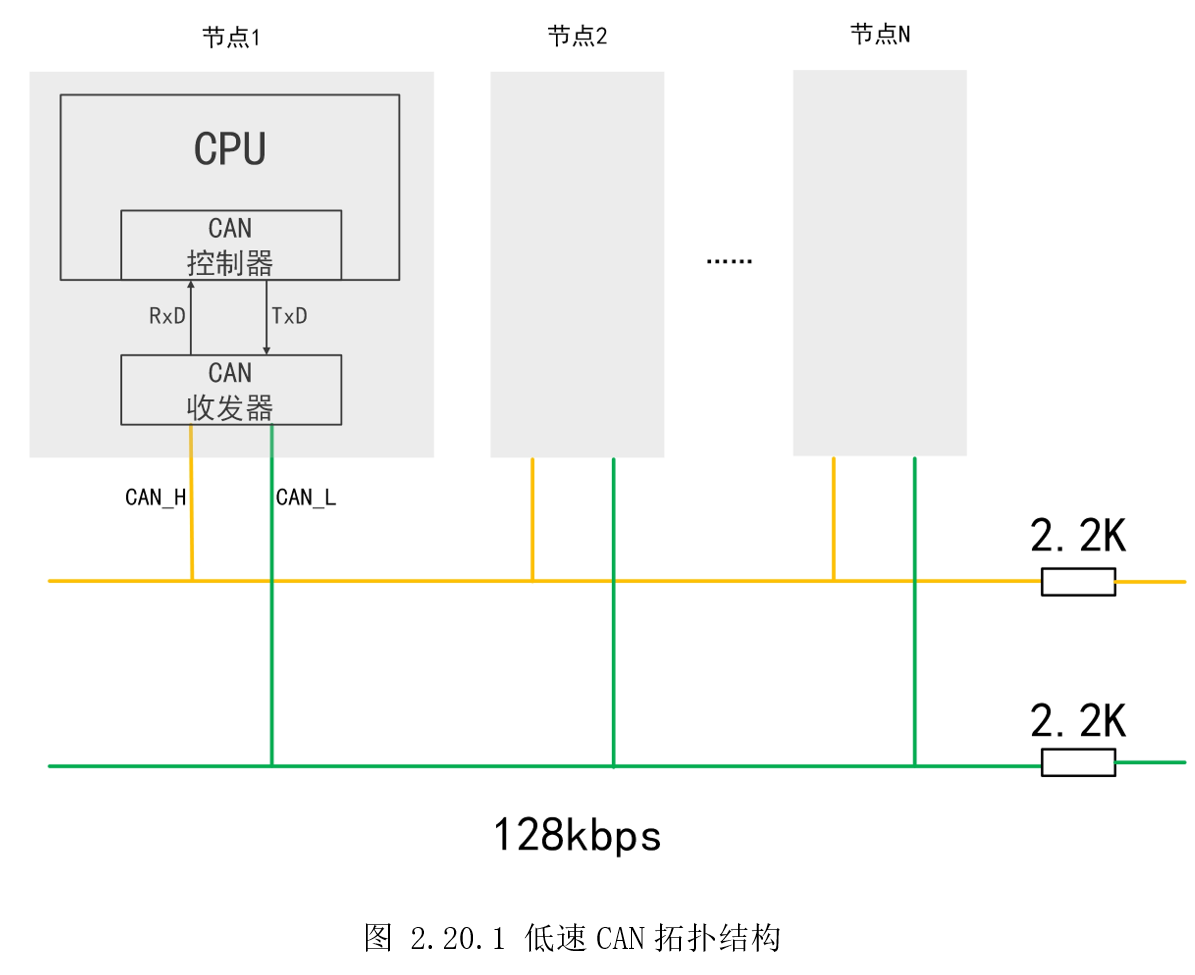
高速CAN主要应用在发动机、变速箱等对实时性、传输速度要求高的场景。低速CAN主要应用在车身控制系统等可靠性要求高的场景,低速CAN在断掉其任一导线后,仍可以继续接收数据,因此在汽车发生交通事故时,使用低速CAN能更大提高设备正常接收数据工作的可能性,提高安全性。
如图 2.20.1所示,是低速CAN的拓扑结构图,如图2.20.2是高速CAN的拓扑结构图。低速CAN总线为开环,高速CAN总线为闭环,总线由CAN_H和CAN_L两根线组成,总线上可以挂多个节点设备。每个节点设备由CAN控制器和CAN收发器组成,CAN控制器通常作为外设集成在MPU/MCU上,而CAN收发器则需要外围添加芯片电路。
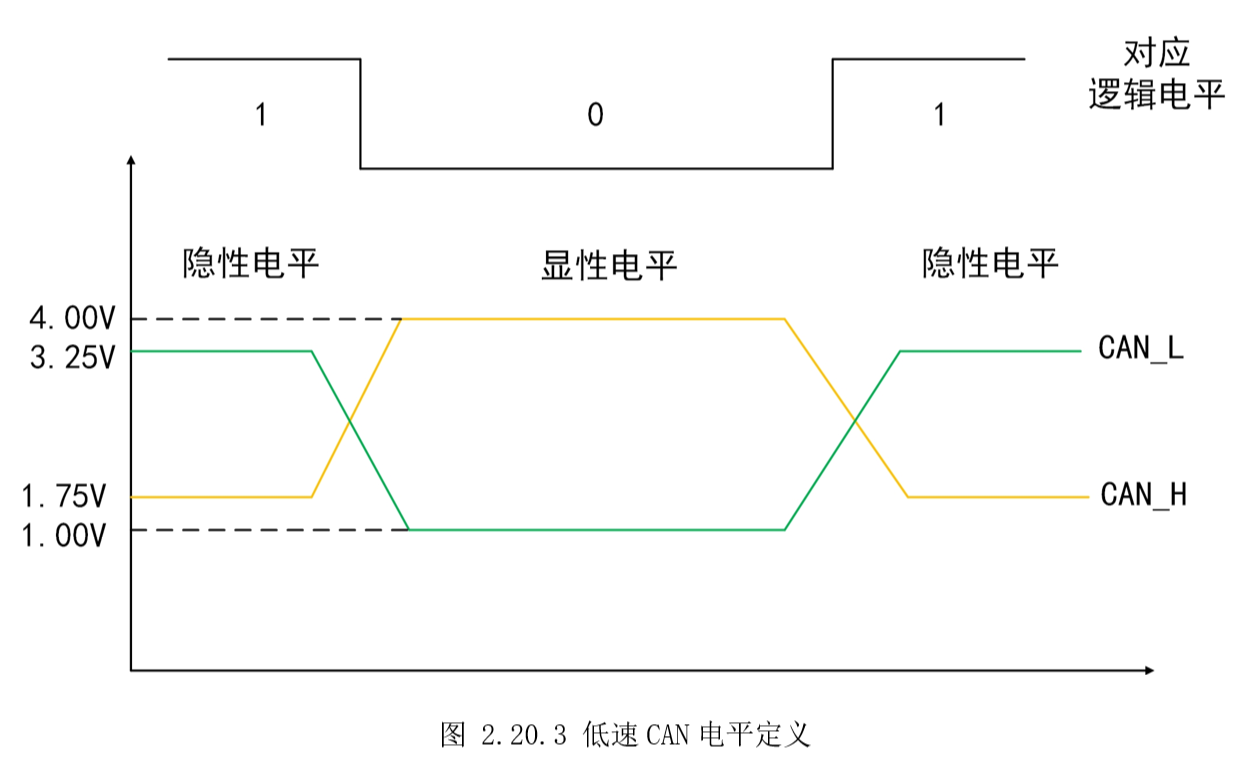
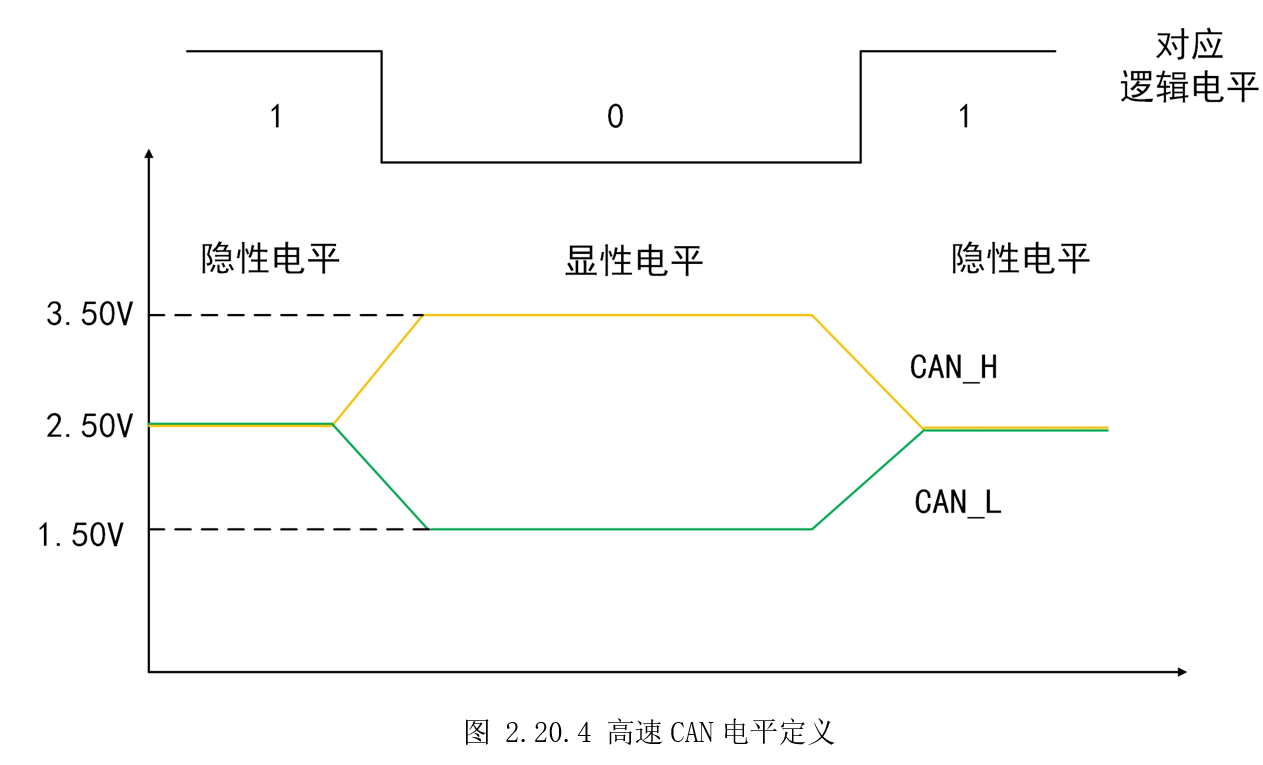
类似RS485,CAN也使用差分信号传输数据。CAN总线使用CAN_H和CAN_L的电位差来表示数据结构。电位差分为显性电平和隐性电平,分别表示逻辑0和1。如图2.20.3所示,是低速CAN(ISO11519标准)的电平定义,图2.20.4是高速CAN(ISO11898标准)的电平定义,两者物理层电气特性不一样,因此不能将它们连接在一起。可以看到当CAN_H和CAN_L电压相近,则表示隐性电平,对应逻辑1,当两个电压相差较大,表示显性电平,对应逻辑0。
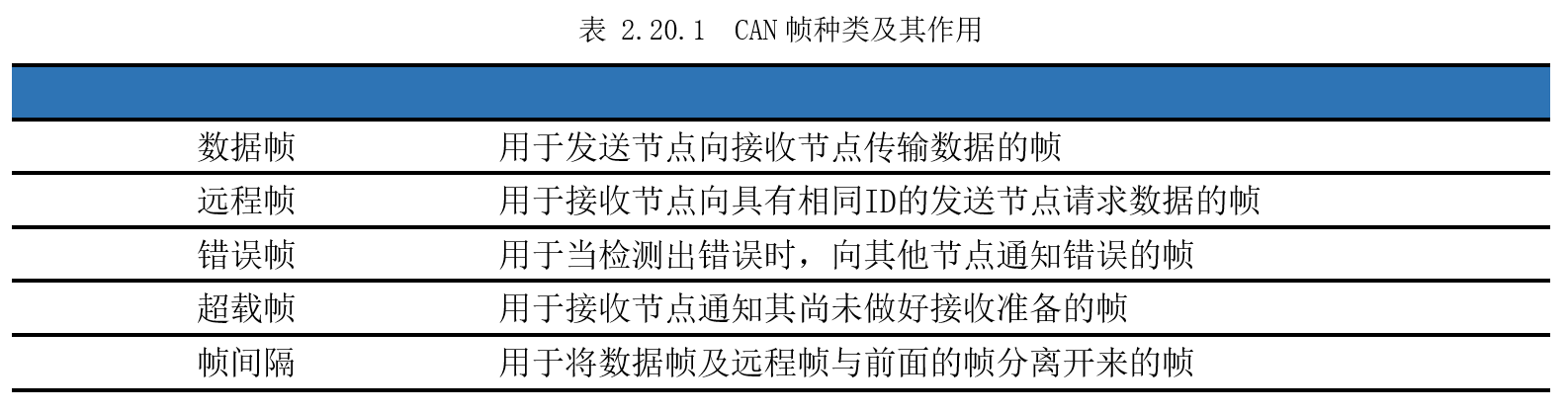
CAN总线以“帧”(Frame)的形式进行通信。CAN总线协议规定了5种帧,分别是数据帧、远程帧、错误帧、超载帧以及帧间隔,其中数据帧的应用最为频繁,表2.20.1是各个帧的用途。
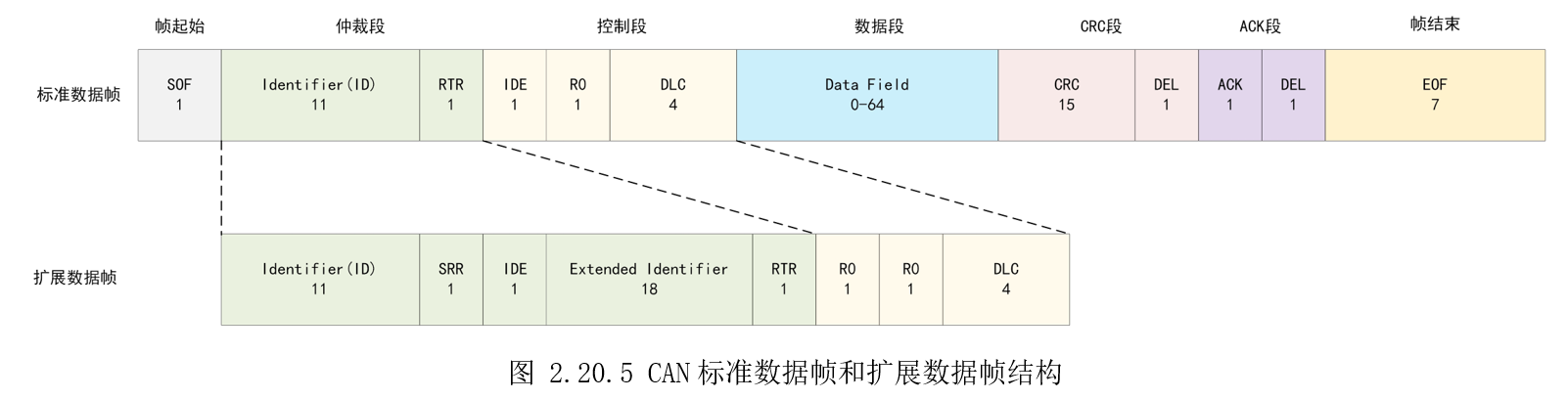
这其中,数据帧是最常用的,也是后面实验需要用到的。数据帧由七段组成,如图2.20.5所示。数据帧又分为标准帧和扩展帧,主要体现在在仲裁段和控制段上。
-
帧起始(Start Of Frame-SOF):1bit,显性信号,表示数据帧(或远程帧)的开始;
-
仲裁段(Arbitration Field):包括标识符位(Identifier field-ID)和远程发送请求位(Remote Transfer Request,RTR);
标准帧的ID位是11位,即范围是0x000~0x7FF,而扩展帧的ID是11+18=29位;在CAN协议中,ID决定报文的优先级高低,也决定这拓扑结构的节点是否接收此ID的帧数据;
远程发送请求位,用于区分该帧是数据帧还是远程帧,显性信号(0)代表数据帧(DataFrame),隐性信号(1)代表远程帧(Remote Frame);
-
控制段(Control Field):标准帧中由扩展标识符位(Identifier Extension bit-IDE,1 bit)、保留位0(Reseved bit0-r0,1 bit)、数据长度编码位(Data Length Code-DLC,4 bits)组成;扩展帧用由两个保留位(Reseved bit,2 bit)、数据长度编码位(Data Length Code-DLC,4 bits)组成;
-
数据段(Data Field):发送数据的内容,最多8个字节(64bit),它的实际长度会写到前面的数据长度编码位DLC里。
-
循环校验段(CRC Field):包括循环校验序列(CRC Sequence)和界定符(Delimiter,DEL);循环校验序列用于校验传输是否正确;界定符用于表示循环校验序列是否结束;
-
确认段(ACK Field):包括确认位(ACK SLOT)和界定符(Delimiter,DEL);确认位在节点收到正确的CRC序列时,发送端的ACK位被置位;界定符表示确认是否正常接收;
-
帧结束(End of Frame-EOF):7位长度,隐性信号,表示帧的结束;
CAN在不断发展,从经典CAN,发展出了FDCAN。经典CAN中的高速CAN,前面提到最大传输率也不过是1Mbps,而FDCAN最高可达8Mbps;经典CAN数据段为64位,FDCAN提升到了512位。
STM32MP157的CAN支持标准CAN和FDCAN,都可以分配给A7或M4,开发板使用的是FDCAN2,实验为了简化,使用标准CAN。
2.20.2 硬件设计
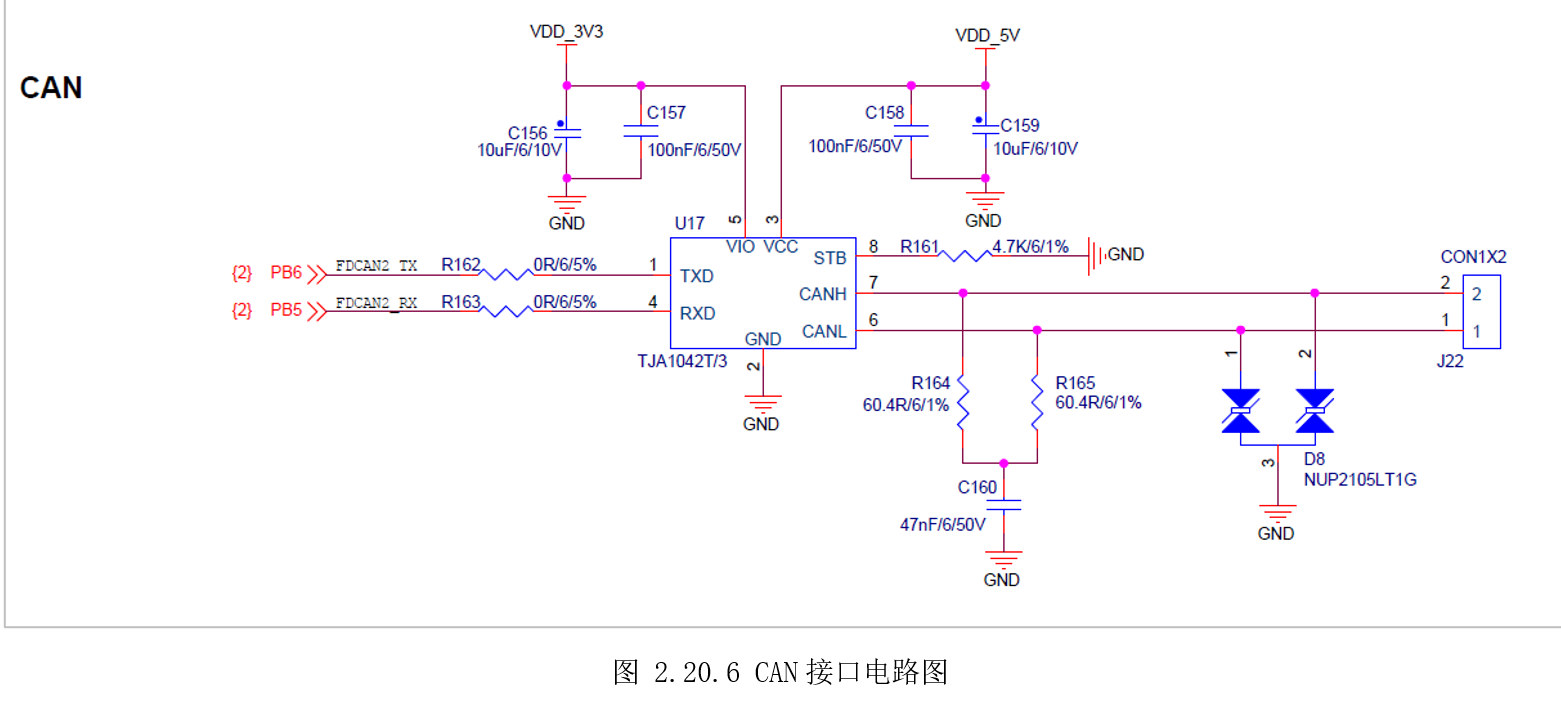
如图 2.20.6是100ASK_STM32MP157的CAN接口电路图,PB5、PB6来自于集成了CAN控制器MCU,通过U17,也就是前面提到的CAN收发控制器,生成CAN_H和CAN_L。
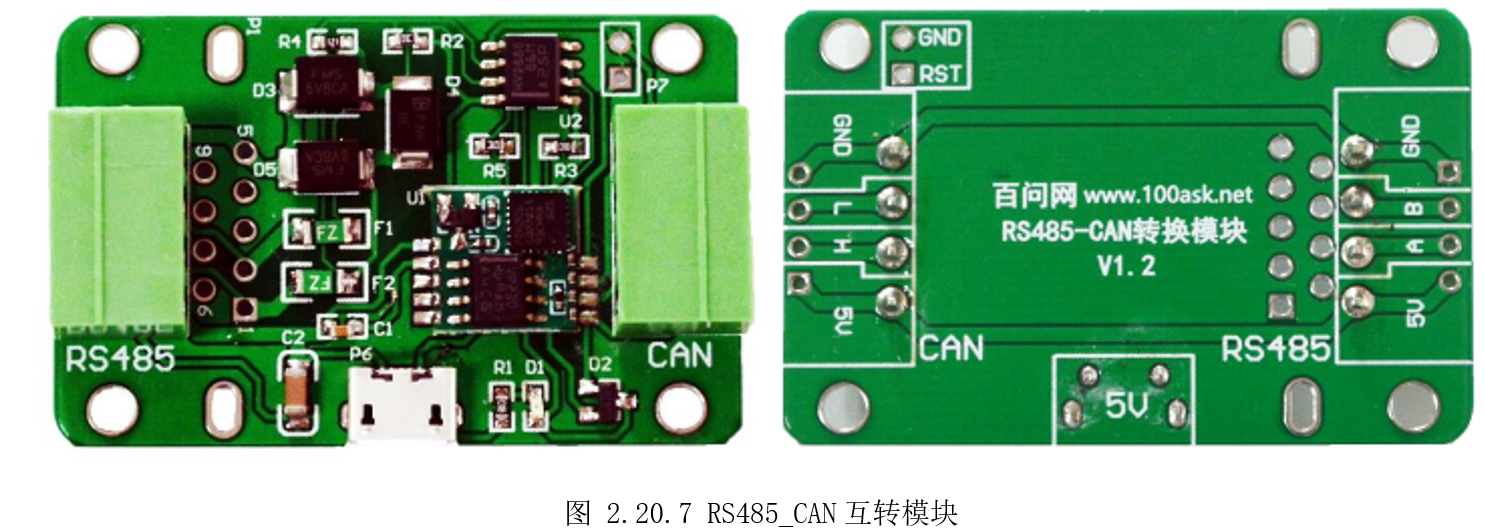
另外,CAN和RS485都是半双工的差分信号,需要两个设备连接测试。百问网制作了一个CAN/RS485互转模块,可以直接连接到100ASK_STM32MP157上,实现RS485的CAN的透传,同时验证、学习两个接口,该模块外形如图2.20.7所示。
本实验除了会用到RS485和CAN以外,还会使用调试串口打印发送情况,按键控制收发,串口打印和按键电路部分参考前面,
2.20.3 MX设置
首先配置MCU系统时钟在209MHz,然后配置调试串口。再参考前面RS485小节添加RS485,注意 RS485_CAN互转模块的默认波特率为9600Bits/s,因此USART6的波特率要设置为9600,如图2.20.8所示。

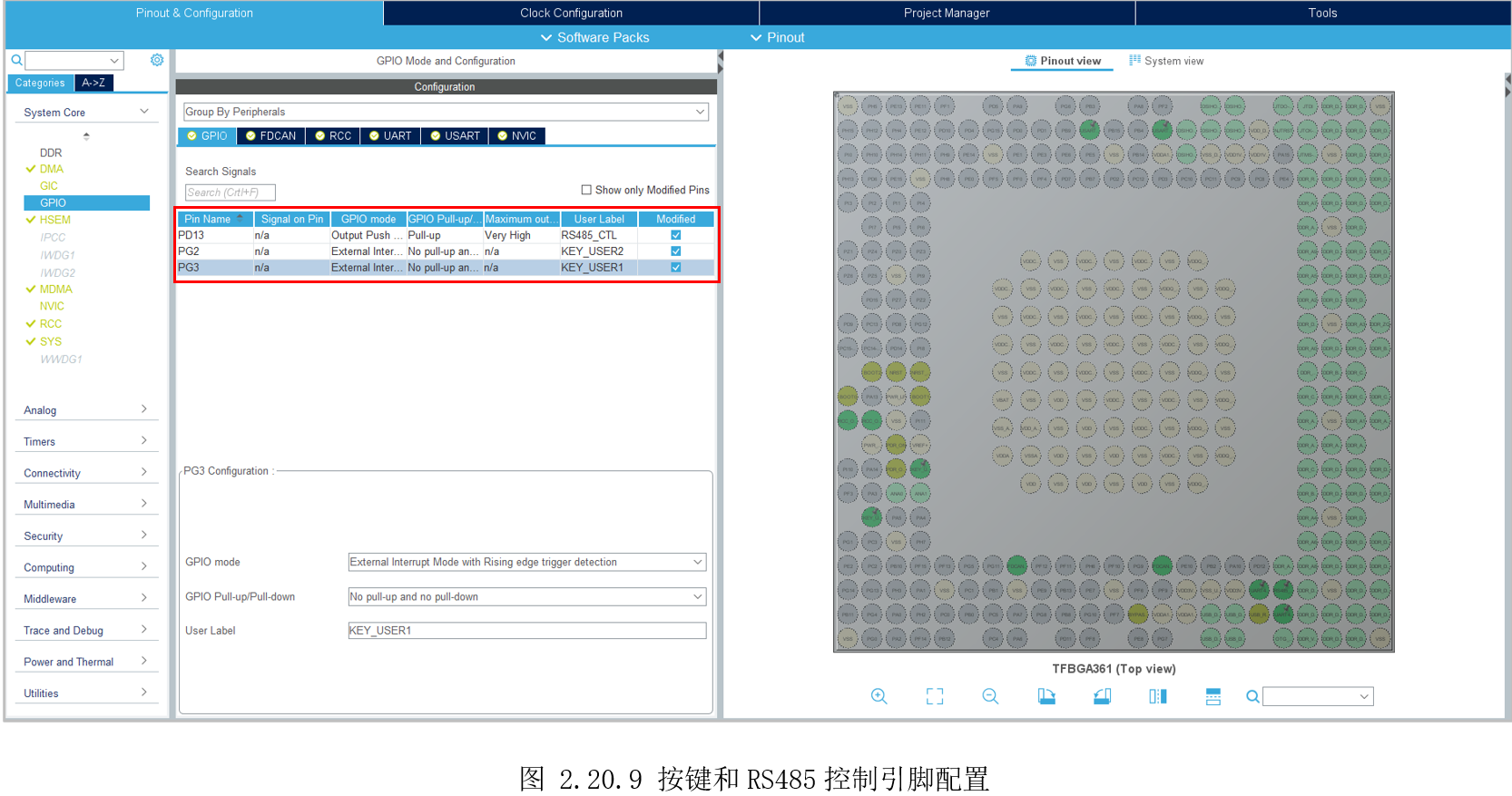
此外还要添加RS485收发控制引脚,这个和前面的配置一样。接着参考前面按键中断实验,添加板子上的两个按键,如图2.20.9所示。记得这个三个GPIO都要设置“PinReservation”给“Cortex-M4”,否则不会生成初始化代码。
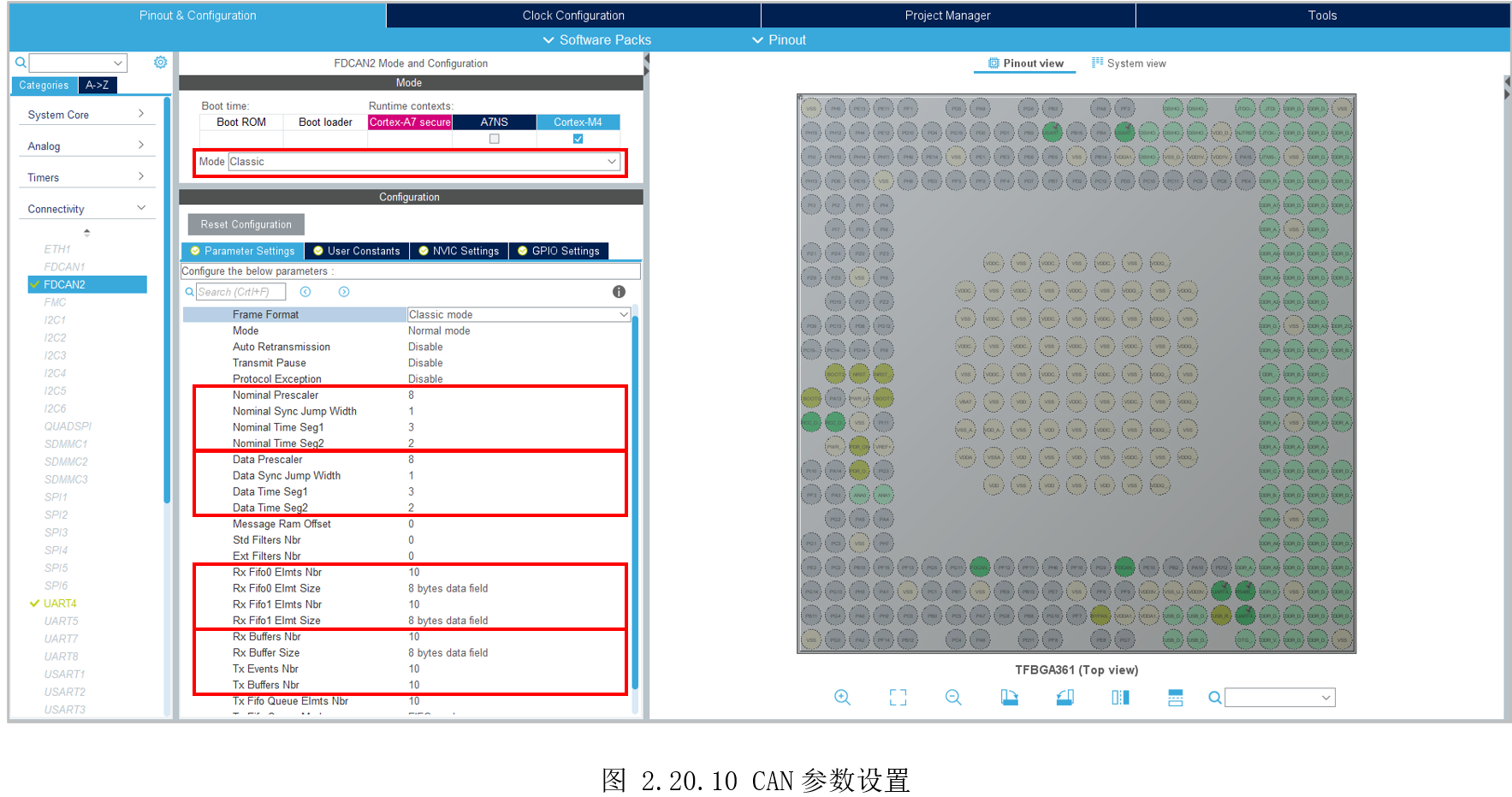
切到FDCAN2标签,勾选给“M4”,模式选择经典CAN“Classic”,如图2.20.10所示。从时钟树可以看到CAN的时钟直接来自外部晶振HSE,也就是24MHz。由参考手册FDCAN部分可知,CAN的波特率等于标称位时间的导数。

时钟预分频为8,因此当前CAN波特率为24/8/(1+3+2)=500。下方还需设置收发FIFO,如图设置即可。
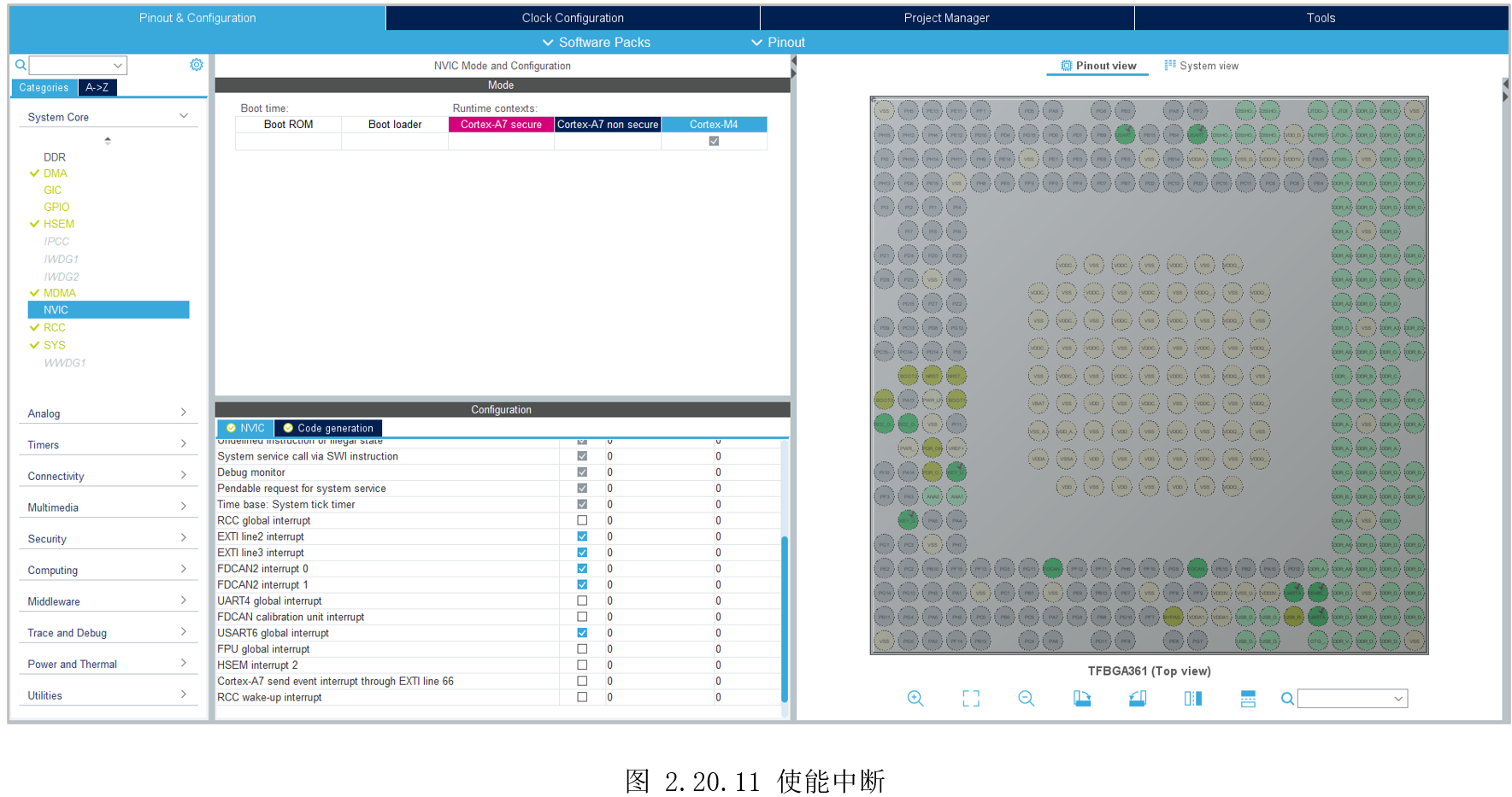
最后使能按键中断和FDCAN中断,如图 2.20.11所示。
2.20.4 代码设计
生成代码后,先将之前按键实验和RS485的“DemoDriver”目录文件复制到本工程。打开“driver_rs485.c”,调用“HAL_UART_Transmit_IT()”发送数据,调用“HAL_UART_Receive_IT()”接收数据,并在中断回调函数里修改收发标志,用于判断是否收发完成。
static uint8_t rs485_rx_flag = 0;
volatile uint8_t rs485_tx_flag = 0;
void RS485_TX(uint8_t *pdata, uint8_t sz)
{
rs485_tx_flag = 0;
// RS485设置为输出
DE_TX();
// 发送数据
HAL_UART_Transmit_IT(&huart6, (uint8_t*)pdata, sz);
while(!RS485_GetTxFlag());
// RS485设置为输入
DE_RX();
}
void RS485_RX(uint8_t *pdata, uint8_t sz)
{
rs485_rx_flag = 0;
HAL_UART_Receive_IT(&huart6, pdata, sz);
}
uint8_t RS485_GetTxFlag(void)
{
return rs485_tx_flag;
}
uint8_t RS485_GetRxFlag(void)
{
return rs485_rx_flag;
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART6)
{
rs485_rx_flag = 1;
}
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART6)
{
rs485_tx_flag = 1;
}
}
新增“driver_fdcan.c”文件,对于CAN,首先要设置过滤,也就是识别仲裁段的ID,这样就有选择的接收CAN总线上自己需要的数据,这里设置为全部接收,不做过滤。
/*
* 此函数设置接收的过滤器
*/
void HAL_FDCAN_SetFilter(void)
{
FDCAN_FilterTypeDef sFilterConfig;
/* 配置CAN的过滤器,此处全部接收,不做过滤 */
sFilterConfig.IdType = FDCAN_STANDARD_ID; // 标准帧
sFilterConfig.FilterIndex = 0;
sFilterConfig.FilterType = FDCAN_FILTER_DUAL;
sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
sFilterConfig.FilterID1 = 0; // ID1和ID2都等于0表示都进行接收不做过滤
sFilterConfig.FilterID2 = 0;
if (HAL_FDCAN_ConfigFilter(&hfdcan2, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO1;
if (HAL_FDCAN_ConfigFilter(&hfdcan2, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_FDCAN_Start(&hfdcan2) != HAL_OK)
{
Error_Handler();
}
// 激活接收FIFO
if(HAL_FDCAN_ActivateNotification(&hfdcan2, FDCAN_IT_RX_FIFO0_NEW_MESSAGE, FDCAN_IT_TX_COMPLETE) != HAL_OK)
{
Error_Handler();
}
}
这里用到了FIFO,需要CAN发送时,把要发送的消息放入FIFO即可。
/*
* 函数名:void CAN_Transmit(uint16_t ID, uint8_t *pdata, uint8_t length)
* 输入参数:ID -> CAN发送报文的ID
* pdata -> 发送报文的首地址
* length-> 发送报文的个数,最多8个字节
* 输出参数:无
* 返回值:无
* 函数作用:CAN发送函数
*/
void CAN_Transmit(uint16_t ID, uint8_t *pdata, uint8_t length)
{
TxHeader.Identifier = ID; // 发送ID
TxHeader.IdType = FDCAN_STANDARD_ID; // 发送帧为标准ID
TxHeader.TxFrameType = FDCAN_DATA_FRAME; // 是数据帧
TxHeader.DataLength = FDCAN_DLC_BYTES_8; // 长度是8个字节
TxHeader.ErrorStateIndicator = FDCAN_ESI_PASSIVE;
TxHeader.BitRateSwitch = FDCAN_BRS_OFF;
TxHeader.FDFormat = FDCAN_CLASSIC_CAN;// 传统CAN
TxHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;
TxHeader.MessageMarker = 0;
if (HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan2, &TxHeader, pdata) != HAL_OK)
{
Error_Handler();
}
}
当CAN收到数据,就会调用CAN接收回调函数,在回调函数里调用“HAL_FDCAN_GetRxMessage()”获取数据。
/*
* 函数名:void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *CanHandle)
* 输入参数:CanHandle -> CAN句柄
* 输出参数:无
* 返回值:无
* 函数作用:CAN接收回调函数
*/
void HAL_FDCAN_RxFifo0Callback(FDCAN_HandleTypeDef *hfdcan, uint32_t RxFifo0ITs)
{
/* Get RX message */
if (HAL_FDCAN_GetRxMessage(hfdcan, FDCAN_RX_FIFO0, &RxHeader, (uint8_t*)&can_rx_data.RX_Data[0]) != HAL_OK)
{
Error_Handler();
}
can_rx_data.ID = RxHeader.Identifier;
can_rx_data.length = RxHeader.DataLength>>16;
rx_flag = 1;
}
此外,想通过按键实现收发开始,这里在按键中断回调函数修改按键标志,主函数查询该标志就可知道是否有按键按下。
extern uint8_t test_flag;
/*
* 函数名:void HAL_GPIO_EXTI_Callback(void)
* 输入参数:无
* 输出参数:无
* 返回值:无
* 函数作用:外部中断处理函数的回调函数,用以处理不同引脚触发的中断服务最终函数
*/
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin)
{
switch(GPIO_Pin)
{
case KEY_USER1_Pin:
{
break;
}
case KEY_USER2_Pin:
{
test_flag = 1;
break;
}
default:break;
}
}
最后,主函数里设计控制流程。首先,让RS485发送ID,CAN接收ID,然后RS485发送数据,CAN接收数据。再反过来,CAN发送ID和数据,RS485接收。主函数的代码如下:
/* USER CODE BEGIN 2 */
HAL_FDCAN_SetFilter();
printf("CAN Send And Receive test\r\n");
printf("\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(test_flag==1)
{
test_flag = 0;
// RS485 Send ID
// RS485->CAN
RS485_TX((uint8_t*)&rs485_id, 2);
printf("\r\n");
printf("Step 0: RS485 Send ID to CAN\r\n");
printf("RS485 Send ID 0x%x\r\n", rs485_id);
step = 1;
}
switch(step)
{
case 0:
{
break;
}
case 1:
{
// Wait for CAN receive finish
if(CAN_Receive() == 1)
{
CAN_SetReceiveFlag(0);
printf("\r\n");
printf("Step 1: CAN wait for Receive ID from RS485\r\n");
printf("CAN Receive Message: \r\n");
printf("\tID: 0x%x\r\n", can_rx_data.ID);
printf("\tLength: 0x%x\r\n", can_rx_data.length);
printf("\tData:");
for(i=0; i<can_rx_data.length; i++)
{
printf("\t0x%x", can_rx_data.RX_Data[i]);
}
printf("\r\n");
step = 2;
}
break;
}
case 2:
{
RS485_TX((uint8_t*)rs485_tx_data, 8);
printf("\r\n");
printf("Step 2: RS485 Send Data to CAN\r\n");
printf("RS485 Send Data: \r\n");
printf("\tData:");
for(i=0; i<8; i++)
{
printf("\t0x%x", rs485_tx_data[i]);
}
printf("\r\n");
step = 3;
}
case 3:
{
// Wait for CAN receive finish
if(CAN_Receive() == 1)
{
CAN_SetReceiveFlag(0);
printf("\r\n");
printf("Step 3: CAN wait for Receive Data from RS485\r\n");
printf("CAN Receive Message: \r\n");
printf("\tID: 0x%x\r\n", can_rx_data.ID);
printf("\tLength: 0x%x\r\n", can_rx_data.length);
printf("\tData:");
for(i=0; i<can_rx_data.length; i++)
{
printf("\t0x%x", can_rx_data.RX_Data[i]);
}
printf("\r\n");
step = 4;
}
break;
}
case 4:
{
// CAN->RS485
printf("\r\n");
printf("Step 4: CAN Send Frame Data to RS485, and RS485 start receive data from CAN\r\n");
CAN_Transmit(fdcan_id, fdcan_tx_data, 8);
RS485_RX(rs485_rx_data, 8);
step = 5;
break;
}
case 5:
{
if(RS485_GetRxFlag())
{
step = 0;
printf("\r\n");
printf("Step 5: RS485 Received data from CAN finished.\r\n");
printf("CAN Send Message:\r\n");
printf("\tID:0x%x\r\n", fdcan_id);
printf("\tLength:8\r\n");
printf("\tData:");
for(i=0; i<8; i++)
{
printf("\t0x%x", fdcan_tx_data[i]);
}
printf("\r\n");
printf("RS485 Receive Data:\r\n");
printf("\tData: ");
for(i=0; i<8; i++)
{
printf("\t0x%x", rs485_rx_data[i]);
}
printf("\r\n");
}
}
default:break;
}/*End switch(step)*/
}/* End while(1) */
/* USER CODE END 3 */
}
2.20.5 实验效果
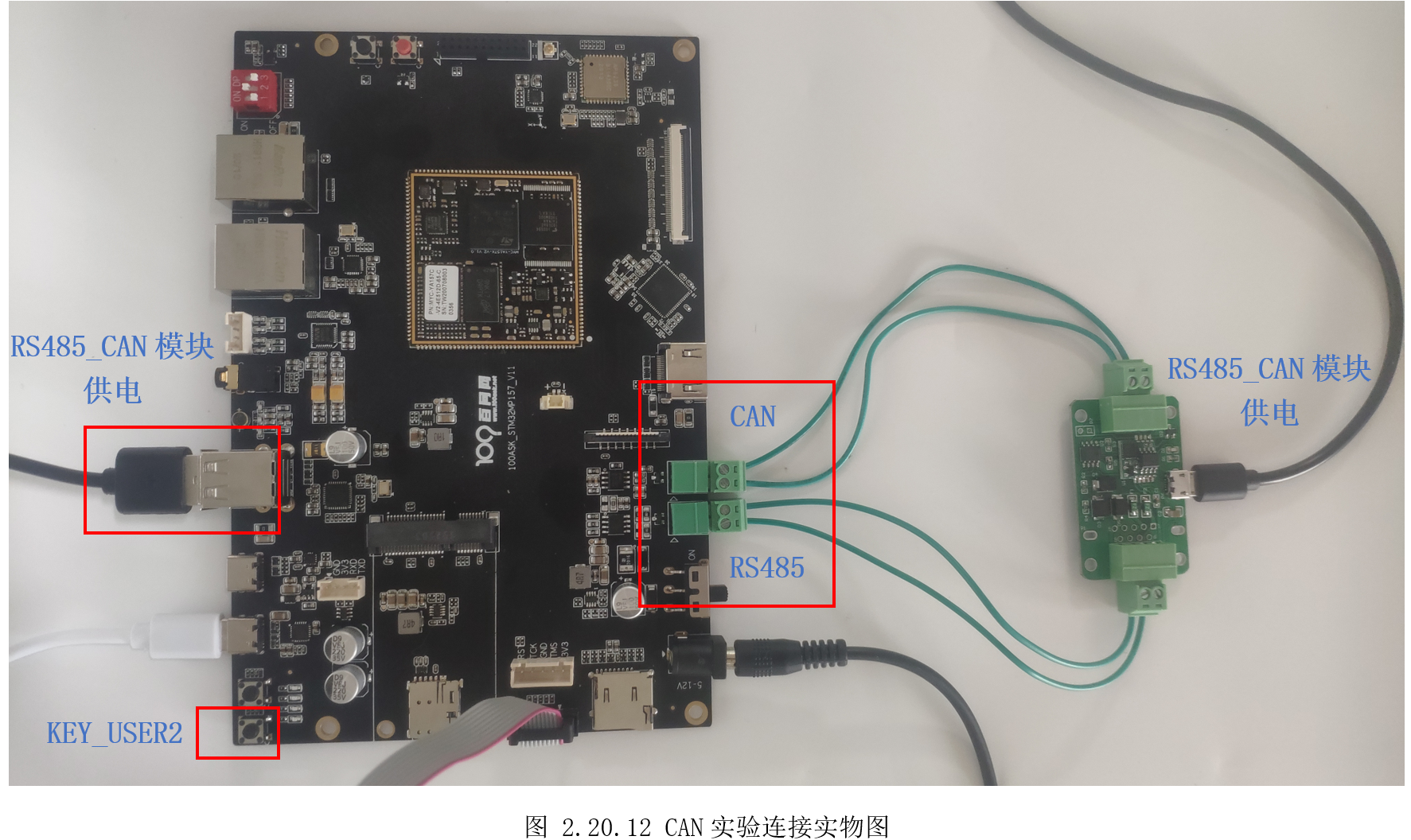
首先如图 2.20.12所示连接好硬件,注意CAN和RS485图中的位置,以及线的连接情况。
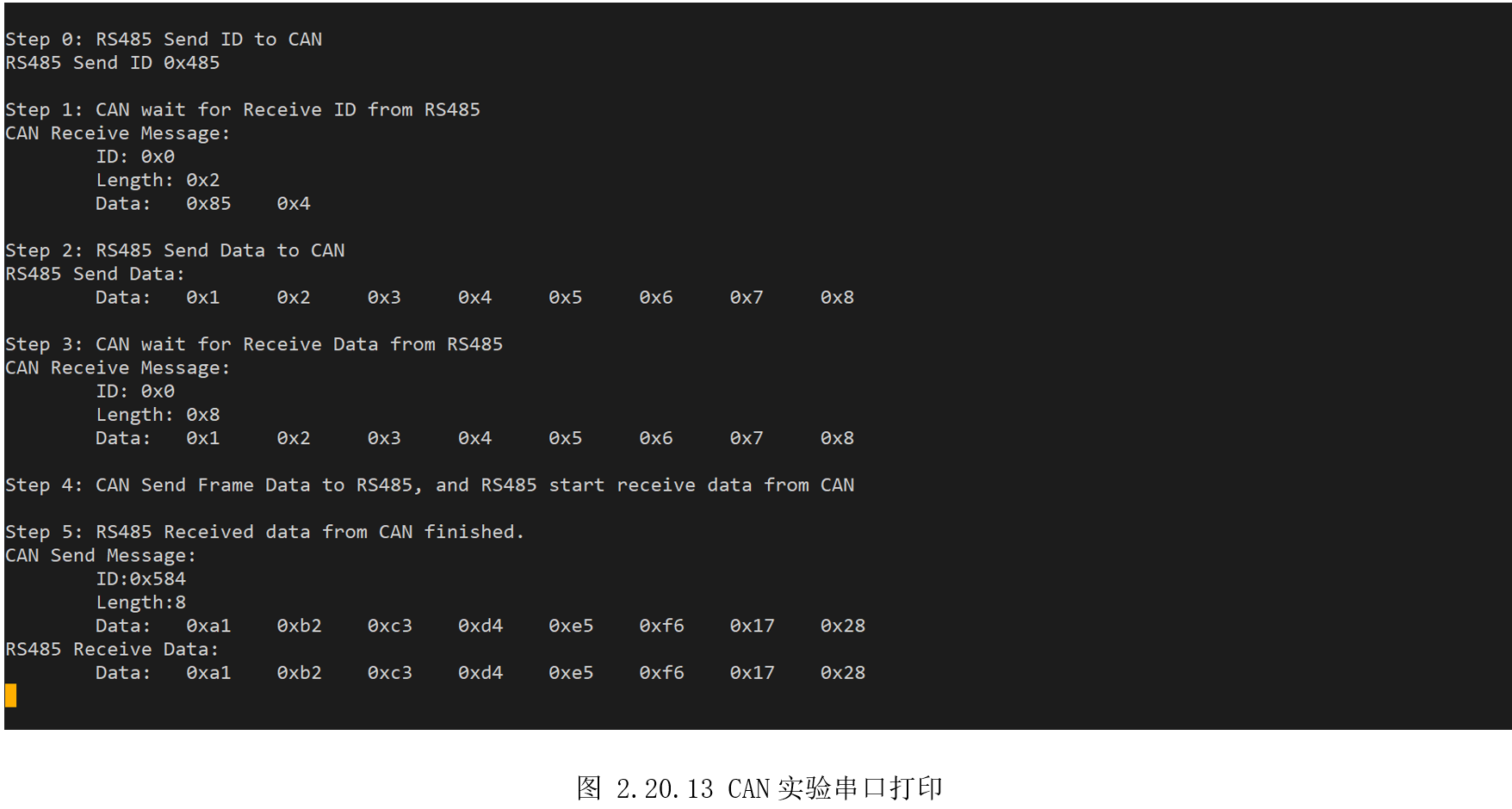
工程模式启动调试,按下按键KEY_USER2,可以看到串口如图 2.20.13打印。
Setp 0-1:RS485想发送ID,但RS485中没有ID概念,这里相当于直接发了一个数据,经过转换模块,CAN实际收到的ID为模块发出的0x00,收到两位数据,也就是RS485发送的ID。
Setp 2-3:RS485发送了8位数据,CAN接到了该8位数据。
Setp4-5:CAN发送一个数据,这个数据包含ID和数据,经过模块转换,ID被省略,RS485只收到数据。
可以看出,该透传模块忽略的ID的发送,经过转换,实现了数据的透传。